Quadruped
Salient Features of the Quadruped
- All terrain exploration.
- Exploration of Hazardous sites.
- Has spring damping system for absorbing shock during its all-terrain movement.
-
Controlled by high torque servo motors.
-
Capable of registering geographical data (map) of the site. It creates 3D map of the site with help of LiDAR sensor (2D) and ultrasonic sensor (height).
- Design is inspired by the mechanism of Boston Dynamics Spot mini Robot.
- Power processing of data with very good graphics through NVIDIA Jetson Nano board.
*This robot has been selected for the Level III of this competition with a prize money of ₹ 50,000/- for qualifying Level I.
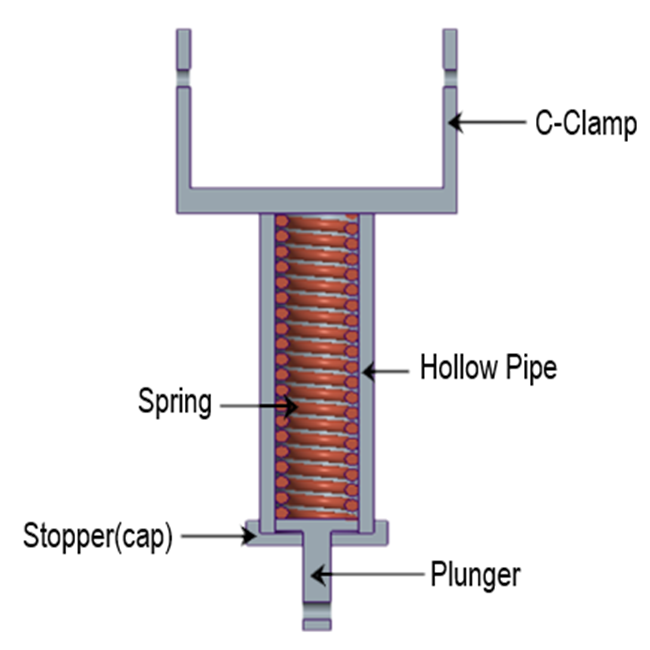
Design of spring damping system

